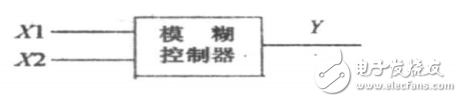
Figure 1: Four-phase Intersection Figure 2: Two-Input One-Output Model
Our Wind Power Lighting Pole, Solar Street Lights Pole are made from quality sheet through bending,
forming, automatic welding and hot galvanization. We can reach one-run
machining length of 14m and can bend sheet of thickness up to 45mm. We
adopt advanced welding procedures, automatically weld main joints and
reach rank-II welding quality.
We have supplied our Wind Power Lighting Pole,Solar Street Lights Pole to Australia, Columbia, England, Kuwait, Iraq, Philippines, Pakistan and etc.
Wind Power Pole, Solar Lighting Pole, Solar Street Lights Pole, Wind and Solar Lighting Poles JIANGSU XINJINLEI STEEL INDUSTRY CO.,LTD , https://www.steel-pole.com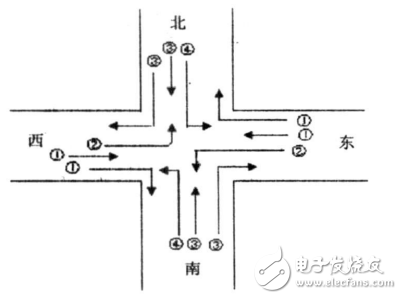
Urban roads are complex and interconnected, with traffic lights serving as a crucial command system for managing urban traffic. As an effective tool for regulating traffic flow and increasing road capacity, traffic lights have proven to be highly effective in reducing traffic accidents. However, traffic volume is constantly changing, while traditional traffic light systems rely on fixed-time control, which can lead to congestion. To address this issue, it's necessary to adjust the timing of traffic lights based on real-time traffic conditions. This paper proposes an intelligent traffic light monitoring system that utilizes a fuzzy control algorithm to optimize traffic light operations.
**1. Overall System Design**
The traffic light monitoring system is designed as a distributed and networked platform, consisting of a central monitoring center and multiple intelligent terminals. These terminals are responsible for centralized monitoring and maintenance of independently operating traffic signals. Each intersection functions as a monitoring terminal, equipped with a data collector, a GPRS module, and a controller. The controller manages the status of the traffic lights, displays time information, and collects vehicle data from each lane. The data collector gathers information from all subordinate controllers and sends control commands accordingly. Using the GPRS network, the collected data is transmitted to the monitoring center, where it is analyzed to monitor road conditions. Fuzzy logic is applied to process vehicle data and adjust traffic signal timings dynamically.
**2. Fuzzy Control Algorithm Design**
Fuzzy control leverages human experience as a control strategy, translating it into natural language that machines can interpret for automated decision-making. In this study, the human-based traffic command strategies are converted into machine-readable algorithms, enabling the system to simulate human judgment in analyzing the optimal time allocation for each lane. For a four-way intersection, the cycle is divided into four phases, as illustrated in Figure 1 (Phase 1: East-West, West-East, West-South, East-North; Phase 2: West-North, East-South; Phase 3: South-North, North-South, South-East, North-West; Phase 4: North-East, South-West).