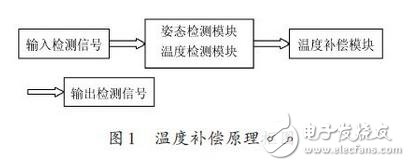
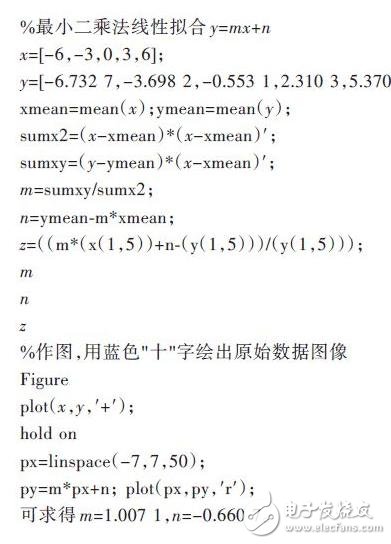
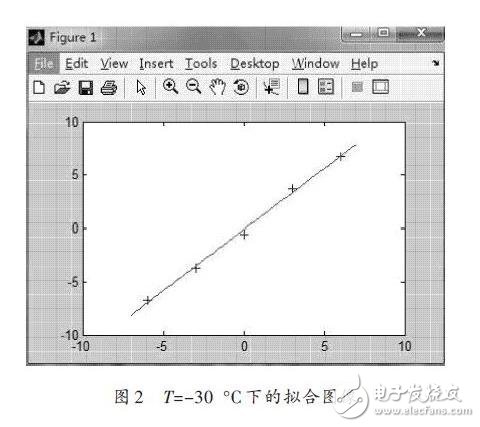
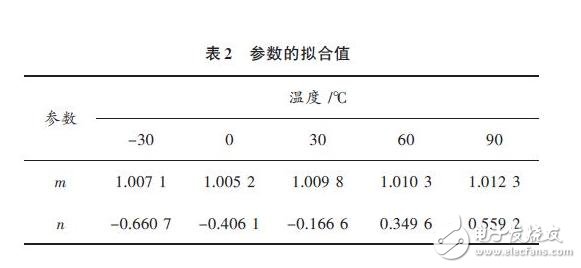
With the development and maturity of the frontier research fields of micro-electromechanical systems (MEMS) technology combined with the integration of electronics, machinery, materials and other disciplines, many MEMS-based sensors have emerged. The sensor has the advantages of small size, light weight, low power consumption, multi-function, etc., and has been widely used in electronics, aerospace, machinery and chemical industries. The temperature compensation method of the sensor can be roughly divided into two types, namely hardware compensation and software compensation. The hardware compensation method mainly changes the circuit to achieve the compensation effect, but this method will lead to circuit complexity and increase the cost. Software compensation methods mainly include least squares method, BP neural network method, regression method and so on. From the two aspects of the convenience of calculation and the accuracy of compensation accuracy, the paper uses the least squares method for temperature compensation. 1 Temperature compensation principle of attitude sensor Does this article use ITG from InvenSense, USA? The 3205 three-axis gyroscope chip has a digital output temperature sensor embedded in it, so the ambient temperature of the sensor can be detected at any time. Under different working environment temperatures, the actual angular output value of the sensor and the theoretical angular output value will have a certain error, which is called temperature error. In order to eliminate or reduce this temperature error, the curve fitting is performed by the least squares method, and finally the theoretical angle output value is reached or approached. The sensor collects relevant data through the attitude detection module and the temperature detection module according to the input detection signal, and then performs temperature compensation through the temperature compensation module, and finally obtains the expected detection signal through the output detection module. The temperature compensation principle of the attitude sensor is shown in Figure 1. 2 attitude compensation method of temperature sensor At the same temperature, the theoretical value and the output value of different angles are strictly a nonlinear relationship, but since this error value is relatively small, it can be approximated as a linear relationship, ie y = mx + The linear relationship of n. The linear fit of the least squares method yields the values ​​of the parameters m and n. At this point, it can be found that the fitted m and n values ​​change with temperature at different temperatures. In this case, the relationship between the temperature and m and n must be found. For this reason, the curve fitting can be performed again according to the least squares method to obtain the relationship between the m value and the temperature. Similarly, the relationship between n and temperature can be obtained. After two curve fittings, it can be concluded that the error between the theoretical value and the output value is significantly reduced and meets the expected requirements. In practical applications, in order to achieve the requirements of high-precision detection, it can be realized by measuring a plurality of sets of data for curve fitting. 3 Experimental data processing of attitude sensor Since the detection principle of each axis is the same, this paper uses the x-axis detection data for experimental verification. The main experimental instruments include measured attitude sensors, theodolites, high and low incubators, and high-precision angle detectors. The data obtained in Table 1 is experimental data without temperature compensation, that is, raw data. 3.1 First linear fit Since the calculation of fitting according to the basic steps of the least squares method is relatively large, this paper uses Matlab for data processing, which not only can reduce the complicated calculation process, but also can ensure higher calculation accuracy. For example, under the condition of temperature T=-30 °C, the theoretical angle x is the independent variable, the output angle y is the dependent variable, and the values ​​of the parameters m and n are calculated according to the linear relation y = mx + n . The specific calculation procedure is as follows: The fitted image is shown in Figure 2 below. The values ​​of the parameters m and n at different temperatures are obtained in turn, and the calculation results are shown in Table 2.
Plastic Jar Food Processors have light weight and easy to carry. And their price is cheaper than Glass Jar Food Processors, cost-effective.
Description for Plastic Jar Food Processors
350W/450W/600W
Including juicer, 1.25L plastic jar blender, chopper and grinder
2 speeds wth pulse
Carton box: 49.5*44.5*61cm 4pcs/ctn
20'GP: 912pcs 40'HQ: 2104pcs
Plastic Jar Food Processors Plastic Jar Food Processors,Baby Food Processor,Plastic Jar Processors,Plastic Food Processors Flying Electronic Co., Ltd , https://www.flyingelectronic.com