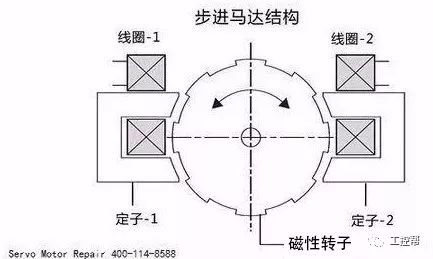
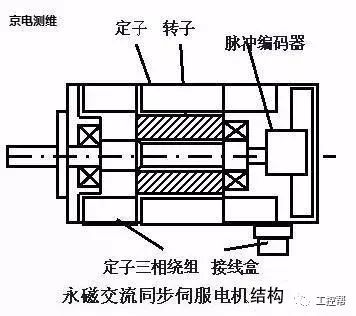
To understand the difference between a stepper motor and a servo motor, it's important to first grasp how each one functions. Both are used in motion control systems, but they operate on different principles and are suited for different applications. A stepper motor is an electromechanical device that converts electrical pulses into precise mechanical movements. Each pulse causes the motor to rotate by a fixed angle, known as the "step angle." This allows for accurate positioning since the number of steps determines the angular displacement. The speed of rotation is controlled by the frequency of the pulses, making it ideal for applications requiring precise, repeatable movement. In contrast, a servo motor uses a closed-loop system for more accurate and dynamic control. Inside the servo motor, the rotor is a permanent magnet, while the stator generates a magnetic field through three-phase power (U, V, W). An encoder attached to the motor provides feedback to the driver, which compares the actual position with the desired position and adjusts accordingly. This makes servo motors highly accurate, especially when high precision is required. One key difference lies in their control methods. Stepper motors rely on pulse signals to determine the rotation angle, where each pulse corresponds to a single step. Servo motors, on the other hand, use pulse width modulation (PWM) to control the position, allowing for smoother and more precise adjustments. Another distinction is in their working requirements. A stepper motor typically needs a driver, a pulse generator, and a power supply. It usually requires two types of pulses: one for direction and one for movement. Servo motors, however, only need a power source and a controller, making them simpler to integrate into some systems. Low-speed performance is another area where they differ. Stepper motors tend to vibrate at low speeds due to their inherent design, which can cause instability. To mitigate this, damping techniques or microstepping are often used. Servo motors, on the other hand, run smoothly even at low speeds and have built-in resonance suppression features to prevent mechanical issues. When it comes to torque characteristics, steppers experience a drop in torque as speed increases, limiting their top speed to around 300–600 RPM. Servos, however, maintain constant torque up to their rated speed (often 2000–3000 RPM), and then switch to constant power output beyond that range. In terms of overload capability, servo motors generally outperform steppers. They can handle short-term overloads, such as sudden changes in load, without losing accuracy. For example, a servo might be able to deliver up to three times its rated torque for a brief period, which is useful in applications with high inertia loads. Steppers, however, lack this feature and often require oversized motors to handle similar situations, leading to unnecessary energy consumption during normal operation. Speed response is another critical factor. Stepper motors take longer to accelerate—typically 200–400 milliseconds to reach operating speed. Servo motors, like the Panasonic MSMA400W, can accelerate from 0 to 3000 RPM in just a few milliseconds, making them ideal for high-speed, high-precision applications. In summary, while both motors are used for motion control, they serve different purposes. Stepper motors are cost-effective and suitable for applications requiring simple, repeatable motion. Servo motors, with their higher precision, better dynamic performance, and stronger overload capacity, are preferred in more demanding environments where accuracy and responsiveness matter most. Pmic Hot Swap Controllers,Pmic Hot Swap Controllers Ec-Mart,Management Pmic Hot Swap Controllers,Hot Swap Voltage Controllers Shenzhen Kaixuanye Technology Co., Ltd. , https://www.icoilne.com